Induction heating is a process that internally heats conductive material through eddy currents and friction when it is exposed to an alternating magnetic field (AMF). Induction heating has been a common technique used in manufacturing and metal hardening, but more recently has been used in fields such as biotechnology. Dr. Sankha Bhowmick and Dr. Caiwei Shen, Mechanical Engineering faculty at the University of Massachusetts Dartmouth, have demonstrated the use of Magnetic Nanoparticles (MNP) with induction heating to aid in drug release and local heating in-vitro (Outside a living Organism) coupled with their drug delivery systems (DSS). Their goal is to demonstrate this capability in-vivo (inside a living organism), such as a mouse, but need an improved induction coil that can target twice the diseased area and twice the local heating than the induction coil in their lab. Along with an improved induction coil, an appropriate mouse containment was developed to hold a mouse in place during this procedure. It has been demonstrated through mathematical, simulation, and experimental methods that these parameters could be achieved by increasing/decreasing the coil diameter and number of turns while utilizing the existing power supply output. This would increase the alternating magnetic field (AMF) and change the applied frequency, which in turn affected the localized heating within these MNPs and the capable range of the AMF. Given the new geometry size of the induction coil, a mouse containment was designed and demonstrated. This project is hypothetical, and no mice were tested on, instead, in-vitro techniques were applied to demonstrate the effectiveness of the solution.
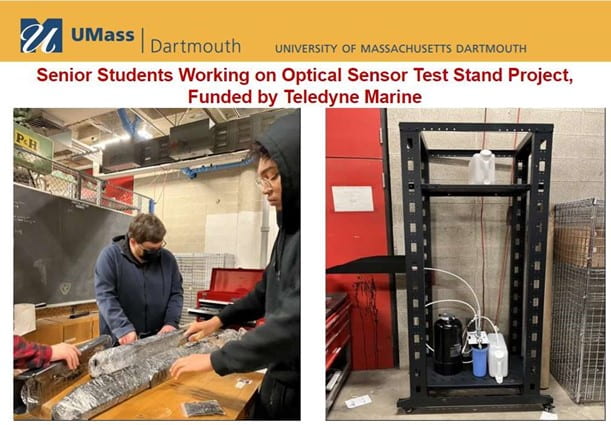
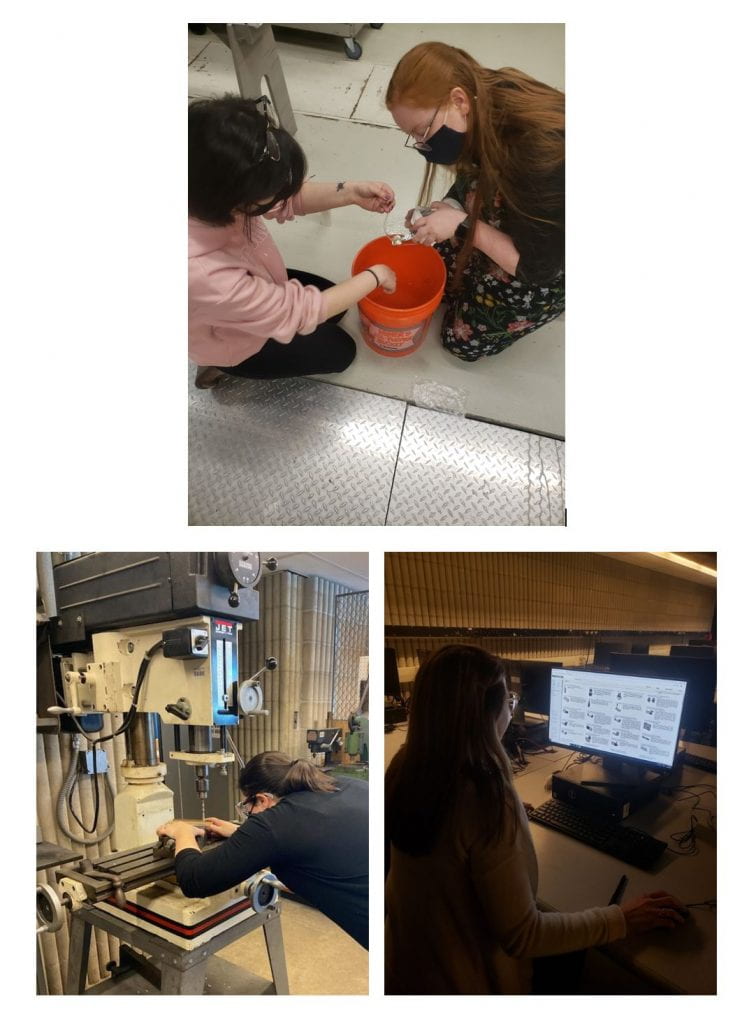
Teledyne Marine uses their Slocum Glider in combination with the Sequoia LISST-Tau Optical Sensor to monitor ocean water. The Teledyne team enlisted the mechanical engineering team at UMass Dartmouth to create a test stand in order to verify the calibration of the LISST-Tau sensor once it has returned from the ocean. This test stand needed to be able to produce ultrapure, degassed water that is capable of performing clear-water baseline readings through the optical sensor. The test stand must also be able to be used by a Teledyne technician easily and intuitively. Since given this task the team has designed a system that utilizes filtration, degassers, water tanks, pumps, and sensors in order to accomplish this design need. This whole system was designed to be encompassed in a prefabricated portable wrack so that it can easily be moved around, and it utilizes gravity to obtain and control the slow, laminar flow passing through the sensors.
Faculty Advisor
Dr. Vijaya Chalivendra
Sponsor
Jesse Desrosiers
Team Lead
Thomas Dawicki
Team Members
Katelynn Peterson, Kaleigh Scott, Ayman Abdelkhareem, Patrick Chevalier
This school year the Davico senior design team was tasked with automating a process that involved wrapping and stuffing a catalytic converter. The sponsor company for this project is Davico MFG located in New Bedford Massachusetts. Davico is an exhaust manufacturing plant specializing in hard-to-find direct fit catalytic converters. A catalytic converter is a part of the exhaust system where a chemical reaction takes place causing carbon monoxide to become carbondioxide using a catalyst to drive the reaction. Davico asked the senior design team to prototype a machine that can fully automate the fabrication process of a catalytic converter which includes wrapping the ceramic tube in fabric and stuffing it into a steel shell. This is the third consecutive year that Davico has sponsored this project and it has not been finished. This year’s team was determined to end that drought by completing what they asked for by the end of the second semester. The process consisted of initial design, fabrication of parts, building machine and testing procedures to prove the concepts. Davico supplied the three components used to make a catalytic converter during this process are ceramic, fabric and aluminum tubes for the students to have testing materials. As this project has been running at the University of Massachusetts Dartmouth for two previous years the group was allowed to use previous years’ materials and work in any way they felt could help. This allowed the team to save time and money while designing and building this machine. In September, the Davico senior design team was shown the previous year’s design. The machine was exceptionally large and did not function properly for several reasons.
After concluding this year’s team would not take the route of trouble shooting and fixing last year’s design, the team took the old machine apart to recycle materials. After initial brainstorming, the team concluded that the machine should be broken down into pieces according to function. The machine is broken into two processes: the first being wrapping the ceramic in fabric and the second being stuffing the wrapped ceramic into the tube. These processes are further broken down in the way that they include loading and unloading techniques. Although it is an extra added step, efficient loading and unloading will allow the machine to perform more effectively. After extensive research online and reviewing previous groups’ work the team brainstormed their own ideas on how to solve this complex problem. After brainstorming and exchanging ideas SolidWorks models were created and dimensioned. The next step was to 3D print models to prove the different concepts before fabricating out of aluminum in the machine shop. Initially the design consisted of a straight-line wrapping and stuffing chamber. This involved a claw wrapping method and a piston used for stuffing directly behind the claw. After testing and analysis this was deemed an impossible design due to repeatability and feeding issues. After weeks of redesigning, the team created a rolling chamber to replace the claw wrapping method. The rolling chamber consists of two “C” shaped brackets with rollers between them allowing an optimal space for the ceramic tube to sit. A motor spins the rollers spinning the ceramic, and the chamber has a conveyor belt feeding fabric on the motorized roller causing the ceramic to be fully wrapped without bunching. After testing the rolling and stuffing chamber the group deemed the design successful mechanically. The rolling chamber paired with the stuffing chamber allows the wrapping process to be fully automated and conduct a manual load/unload of the components in the stuffing machine making the team successful based on the initial project goal.
Faculty advisor
Dr. Kihan Park
Sponsor
Raymond Surprenant at Davico Manufacturing
Team lead
Kyle Sylvia
Team Members
Tyler Lyons, Kevin Swenson, Nathan Lozada, Justin Butterfield, Eric Sylvia
Fabrication and Evaluation of Drag Reduction of Super-Hydrophobic Surfaces
Abstract
The highly water-repellent, superhydrophobic surface (SHS) has a large potential to reduce hydrodynamic friction drag in laminar and turbulent flows, and thus has applications in many areas including maritime transportation, oil transmission, and micro-fluidic medical devices. Here, we aim to experimentally demonstrate the drag reducing property of the superhydrophobic surface in laminar channel flows, and validate previously researched theoretical models. Various superhydrophobic surfaces, consisting of both well controlled and randomly roughed surface textures, are fabricated through processes such as photolithography, sandblasting, and 3D printing technologies. A transparent microchannel made of acrylic with an inner dimension of 135 x 10 x 0.5 mm (length x width x height) has been designed and constructed for performing the necessary measurements. The Reynolds number of the channel flow ranges from 10 to 2000, below the value of laminar-turbulent transition. The friction drag of the sample is measured based the pressure drop in the channel through a differential pressure sensor. The air layer on the surface is simultaneously monitored through high-resolution imaging. We study the effects of Reynolds number, texture geometry, hydrostatic pressure on the drag reducing performance of the surface. The results of this study provide further guidelines on the industry applications of superhydrophobic surfaces.
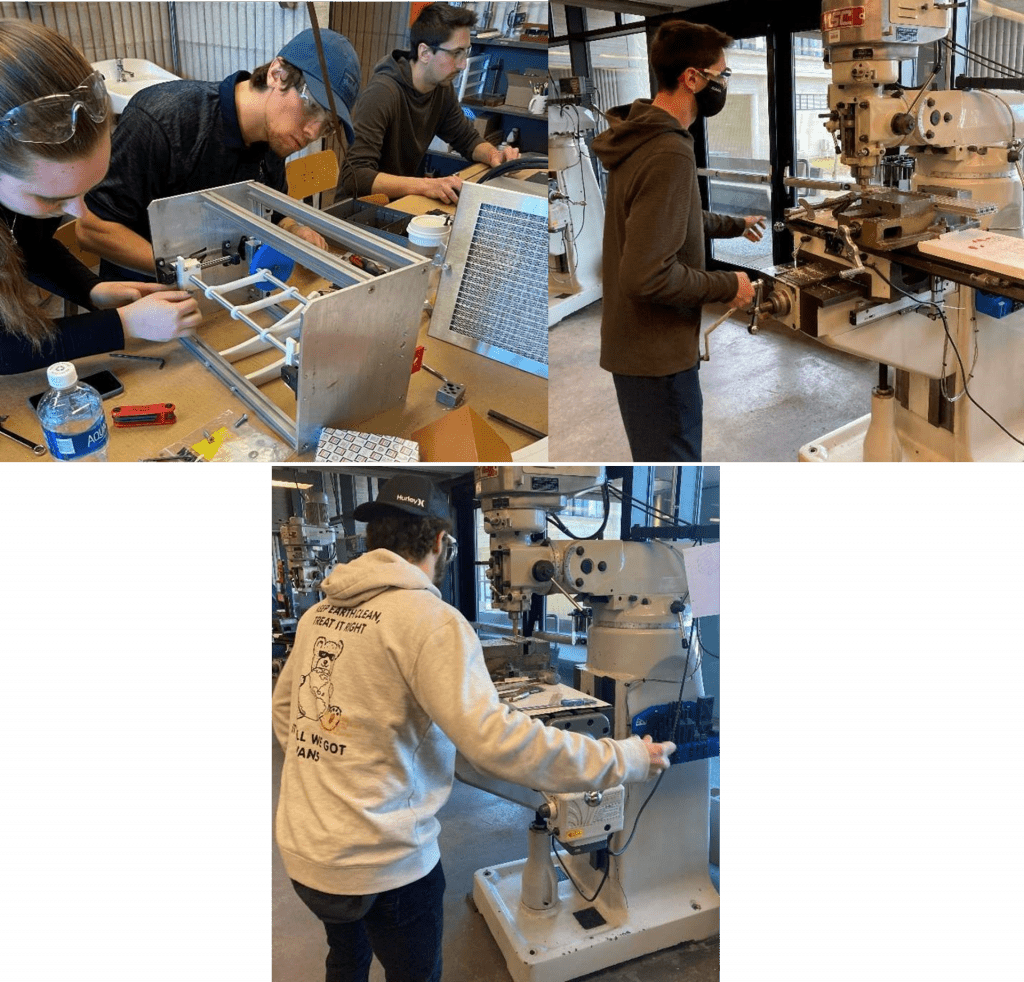
Wave Generator Design and Fabrication for Fluid-Structure Interactions Laboratory
Abstract
The Wave Generator Group has been tasked to design and fabricate a wave generator for the Fluid-Structure Interactions (FSI) Lab. This wave generator will be used to create waves of different frequencies and amplitudes to mimic the movement of the ocean. At the moment the FSI lab has a water tunnel that creates a current and a wind tunnel. These two aspects create a realistic environment for the small-scale offshore platforms that the lab conducts experiments on but the addition of waves would make the most realistic small-scale environment possible. The wave generator that has been created fits in the water tunnel, above the water line and has a drive shaft that is above the water tunnel and is connected to the motor on a truss system on the side of the tunnel. The entire system is controlled by an electrical box that was created by the 2020-2021 Senior Design Team. This team had to create a one-of-kind system to be able to create waves in this unique lab setup. This team was create multiple design ideas before coming to the final decision and through many tests and changes, the team was able to create a product for the FSI Lab that is able to create waves for testing purposes.
Faculty advisor
Dr. Banafsheh Seyed-Aghazadeh
Sponsor
Dr. Banafsheh Seyed-Aghazadeh
Team lead
Keira Ahern
Team Members
Christopher Brosch, Sean Mackay, Christopher Stangarone, Griffin Wiencek
CCRAM Calibration has been tasks to make a calibration tool for Fluid Metering Inc. (also referred to as FMI ). The tool must also account for the increased volume of pumps manufactured by the sponsor so that FMI will be able to calibrate pumps at a faster rate than their current calibration process. The tool that the team designs must be within a tabletop area of 3’ x 2’ and be able to attach to the current frame in FMI’s production setting. The tool will help to save FMI money in wages as their manufacturing and demand increases, this happens in the form of saving money on wages and operating time or run time. CCRAM Calibration is also working to shorten the average calibration time with the implementation of this tool, where the current process takes between 4-8 minutes. The team also had to complete this using the frame and engineering workbench coding provided by FMI. The coding base was from Visual Basic, the software used on excel, and the frame was a general testing frame that was not in the production setting. With these aspects in mind, CCRAM had to provide a tool that worked with the equipment provided and be redesigned to fit the production material found in the sponsors facility. Multiple designs were sketched out, printed, and teste to attempt to attain the best design with minimal impact to the sponsor’s current process. The team has had to adapt and learn how to work with many fixed constraints and conform the design to the constraints so that the best quality product could be produced for the project and the future implementations of the product.
Faculty advisor
Dr. Jun Li
Sponsor
Sean Madden
Team lead
Cameron Nataly
Team Members
Christopher Riordan, Ralph Gifford, Matheus de Souza, Abdul Raffae
The purpose of this project was to develop a new product that aims to better organize the trunk space of the vehicle. We found that people usually pile items vertically in the trunk space and this new product would aim to allow customers to better utilize the trunk space. This was done by creating a base that would be inserted into the back of your trunk which would allow accessories to then interface with the base product. This was accomplished via numerous prototypes. The final design consists of four walls which make up the base structure. The base structure was able to fold into a compact package with the accessories enclosed. While we do not have a physical full-scale mock up, we did detail our designs enough to 3D print something at scale and present our full-scale ideas to manufacturers for feedback.
Faculty Advisor
Dr. Alex Fowler
Sponsor
Alex LeGendre
Team Lead
Josh Caron
Team Members
Benjamin Adams, Jake Wilkinson, and Matthew Barboza
From left to right: Benjamin Adams, Joshua Caron, Matthew Barboza, Jake Wilkinson
The Unmanned Surface Vehicle was designed to increase efficiency and autonomy abilities when conducting marine research. The basic materials provided for the project was a Yamaha jet ski that had not been modified in any way. The task of creating a remote control and basic autonomous vehicle was given to five mechanical and four electrical engineering students, in order to fulfil the vehicles’ operational requirements. The conversion of all mechanical processes such as the steering, throttle, and choke adjustment were to be redesigned to be remotely adjusted using electronic components, removing the need for an operator on the machine. This project also created a connection between the customer and the engineering department. The SMAST research center will be using the vehicle as long as expectations are met. The purpose of the requirements was to create a platform that can be recreated or adjusted in order to continue work between SMAST and the engineering department. The basic expectations of the vehicle were to operate at a minimum of 5 knots, remotely operate all controls, and have basic autonomy waypoint abilities.
Faculty advisor
Dr. Kihan Park
Sponsor
Russ Sylvia and Phil Nicolescu
Team lead
Andrew Pratt
Team Members
Jared Dubois, Mark Mesdary, Austin Sa, Riely Thorpe
The Maximal Asymmetric Drag Wave Energy Converter (MADWEC) device is being built and tested at the University of Massachusetts Dartmouth’s School of Marine Science and Technology (SMAST). The MADWEC is used to harness the energy of oceanic waves to create electrical energy. It is a point absorber type wave energy converter that consist of a ballast, PTO unit, and buoy. Team MADWEC consists of many students and faculty members across various disciplines that all collaborate together to complete a design-oriented project that is entered into a worldwide competition for the Marine Energy Collegiate Competition (MECC) sponsored by the U.S. Department of Energy. The MECC values the impact our work has on our communities and the blue economy. For this reason, our MADWEC team has conducted various community outreach events in an effort to inspire Boston-area high school students to take interest in STEM and blue economy fields through presentations on our work and research. Our hope is that we are able to make a lasting impact on the field of renewable energy—ocean wave energy harvesting specifically.
Over the last nine months our team has worked to improve and optimize past years designs. We started by making improvements to the system’s overall design and components. Old parts were replaced with more robust components and some new parts were designed and manufactured on campus to improve the PTO unit’s efficiency. Following that, we improved the dry testing set up by designing a system that utilizes a winch to create tension in the tether by rotating an arm with various wave height adjustments at different speeds in a circle to simulate various oceanic wave conditions. The rotational motion of the winch is converted into linear displacement of the tether. This connects the PTO reel to the winch arm through a series of pulleys and causes line to be pulled off the PTO reel creating rotational motion of the PTO shaft. This mechanical energy is converted into electrical energy through the internal components of the PTO unit. Housed inside this PTO unit are the following components, six shafts, a torsions spring, a slip clutch, a one way bearing, two gearboxes, six generators, a rectifier, and a battery. These components work in conjunction with one another to allow the MADWEC system to harness energy from ocean waves of up to 2 meters in height. The input and output power were recorded for several different conditions. The input power of the system is acquired through the use a load cell to gather force data, and an ultrasonic sensor to capture the linear velocity of the tether’s displacement. Our output power is in the form of electrical energy which is measured through the use of Arduinos and an oscilloscope. With all of this data captured we are able to find the efficiency and charging capabilities of our system. The projected use for this MADWEC device is to store electrical power to recharge ocean surveillance vehicles such as Autonomous Underwater Vehicles (AUV).